Change Language :
Die igus Robot Control Software
Lizenzfrei Roboter programmieren, simulieren und steuern
Die igus Robot Control Software ermöglicht eine einfache und intuitive Roboterprogrammierung und -steuerung und somit einen leichten Einstieg in die Automatisierung. Durch den modularen Aufbau können verschiedene Roboterkinematiken, zum Beispiel Delta Roboter, Portalroboter und Mehrachsgelenkroboter gesteuert werden. Mit der Software können die einzelnen Bewegungen des Roboters auf der 3D-Oberfläche simuliert werden – dabei muss der Roboter für diesen Schritt nicht angeschlossen werden.
Das finden Sie auf dieser Seite
Kostenlose Robotersoftware
Programmierbeispiele von verschiedenen Anwendungen mit der Roboter-Software
- Einfache Verbindung zwischen Roboter und Steuerung
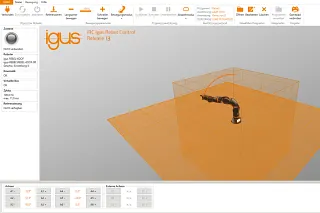
- Intuitive Bedienung mit 3D-Oberfläche und digitalem Zwilling ermöglicht direkte Ausführung und Überprüfung der Bewegungsabläufe
- Kamera Schnittstellenkonfiguration direkt über Steuerung und Software möglich
- Programmierung von Delta-, Portal-, SCARA und Gelenkarmarmrobotern
- Software ermöglicht risikofreies Testen bereits vor dem Kauf
Systemvoraussetzungen:
- PC mit Windows 10 Betriebssystem
- Kommunikation über Ethernet oder WLAN
- 500 MB freier Speicherplatz
Musterprogramme, Wiki und Trainings



Schnittstellen
SPS-Schnittstelle
Die SPS-Schnittstelle (PLC-Schnittstelle (PLC = Programmable Logic Controller)) ermöglicht die Ausführung von Basisfunktionen und die Signalisierung von Zuständen mittels digitaler Ein- und Ausgänge. Neben der Steuerung durch eine SPS ermöglicht diese Schnittstelle auch die Bedienung durch Hardwaretaster.
Digitale Ein- und Ausgänge
Über digitale Eingänge oder globale Signale können Roboterprogramme geladen und gestartet und Greiferbefehle versendet werden. Dies ist beispielsweise nützlich, wenn über Taster oder die CRI-GSig-Anweisung ein Programm aus einer vorgegebenen Auswahl gewählt werden soll.
Modbus TCP/IP
Über die Modbus-TCP-Schnittstelle können beispielsweise SPS-Daten und Anweisungen an die Robotersteuerung gesendet und Zustandsinformationen empfangen werden.
CRI-Schnittstelle
Die CRI-Schnittstelle ermöglicht das Senden komplexer Anweisungen und den Abruf von Informationen und Einstellungen über die Ethernetschnittstelle per TCP/IP. Die igus Robot Control verwendet diese Schnittstelle um sich mit Robotern mit integrierter Steuerung oder anderen Instanzen der Steuerungen zu verbinden.
Kameraschnittstelle
Die Kameraschnittstelle ermöglicht die Verwendung von Objekterkennungs- und Videokameras. Objekterkennungskameras erkennen die Position und Klasse von Objekten und übertragen diese, optional mit einem Videobild, an die Steuerung. Aus den Objektpositionen der Kamera berechnet die Steuerung Positionen im Roboterkoordinatensystem. Reine Videokameras liefern nur Bilder und können daher nur zur Beobachtung des Arbeitsbereichs, jedoch nicht für die Objekterkennung verwendet werden.
Cloud
Die Cloud-Schnittstelle ermöglicht die Überwachung des Roboters über RobotDimension. Nach Aktivieren und Anmelden sendet der Roboter grundlegende Zustandsinformationen und Kamerabilder an den Online-Dienst. Auf der Webseite kann der Nutzer seine Roboter auflisten und die Informationen abrufen.
ROS, Matlab, LabView, uvm.
Integrieren Sie die Roboter in Ihre ROS-Umgebung. Dokumentation und Pakete für Hardware-Kommunikation, Teleop und moveI
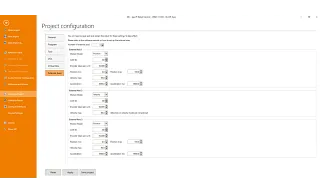
Projektkonfigurationen
Greifer
Hier kann das montierte Werkzeug festgelegt werden. Das Ändern des Werkzeug erfordert ein Neuladen des Projekts beziehungsweise den Neustart der integrierten Steuerung. Neue Werkzeuge können als Konfigurationsdatei im Verzeichnis "Data/Tools" definiert werden
Virtuelle Box
Durch die Einstellungen der virtuellen Box wird der Bewegungsbereich des Roboterarms eingeschränkt. Diese Funktionalität hilft, mechanische Schäden zu vermeiden und vereinfacht je nach Anwendung die Programmierung. Wird ein Programm ausgeführt, das die virtuelle Box verletzt, wird es mit einer Fehlermeldung gestoppt.
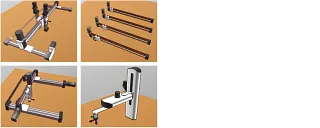
Externe Achsen
Die Robotersteuerung unterstützt bis zu 3 Zusatzachsen (in iRC auch "externe Achse" genannt). Diese können entsprechend der Roboterachsen eingebaut und über den Konfigurationsbereich von iRC konfiguriert werden.

Programme
Hier können Sie das Roboter- und Logikprogramm, die Bewegungsgeschwindigkeit (in Prozent der Höchstgeschwindigkeit), den Abspielmodus und die Reaktion bei Programmfehlern festlegen.
Sonderkinematiken
Die Robotersteuerung kann individuell für Ihren Roboter mit Digitalen Zwilling konfiguriert werden. Passend für das Projektgeschäft konfigurieren wir Ihnen die Inverse Kinematik.
Programmierung
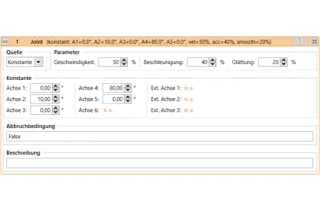
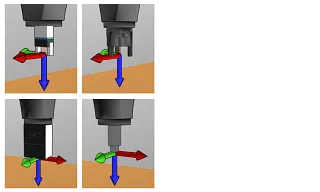
Achsbewegungen
Der Befehl Joint bewegt den Roboter zu einer absoluten Zielposition, die in Achskoordinaten (z.B. Achswinkel oder Position einer Linearachse) angegeben ist. Die daraus resultierende Bewegung des TCP ist in der Regel eine Kurve und keine gerade Linie.
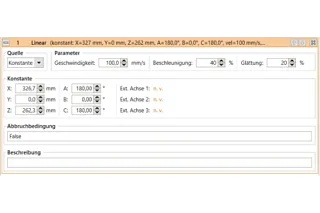
Lineare Bewegung
Der Befehl Lineare bewegt den Roboter zu einer absoluten Zielposition, die in kartesischen Koordinaten angegeben ist. Die resultierende Bewegung des TCP folgt einer geraden Linie.
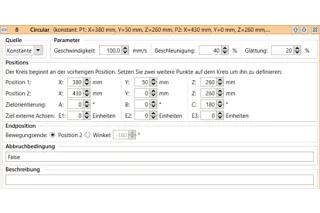
Kreisbewegungen
Die Anweisung "Kreisbewegung" ermöglicht Bewegungen entlang einer Voll- oder Teilkreisbahn. Sie ist kompatibel zu Linearbewegungen, sodass der Übergang von und zu Linearbewegungen überschliffen werden kann.
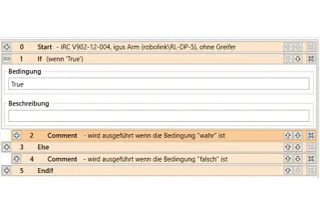
Bedingungen
Bedingungen können in if-then-else-Befehlen, Schleifen und als Abbruch-Bedingungen in Bewegungsbefehlen verwendet werden. Die Bedingungen können Kombinationen aus digitalen Eingängen, globalen Signalen, booleschen Operationen und Vergleichen sein.
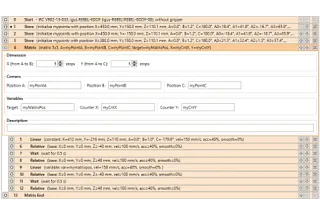
Matrix-Berechnung
Die Rasteranweisungen berechnen an einem Raster ausgerichtete Positionen, z.B. als Greif- oder Ablageposition für Palettierungsaufgaben.
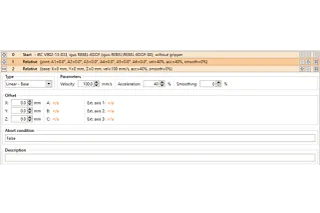
Relativ
Der Befehl Relativ erlaubt es, den Roboter relativ zu seiner aktuellen Position zu bewegen. Er kann über die Menüpunkte unter "Aktion" → "Relative Bewegung" aufgerufen werden.

Unterprogramme
Mit dem Sub-Befehl können Unterprogramme aufgerufen werden. Der Pfad zur Datei des Unterprogramms ist unter "Dateiname" angegeben. Er ist relativ zum Unterordner "Programs" des iRC-Ordners "Data".
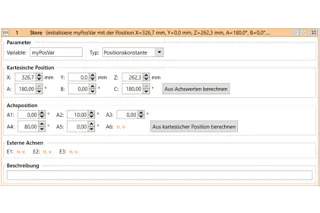
Variablen und Variablenzugriff
In Programmen für die igus Robot Control und TinyCtrl werden zwei Arten von Variablen unterstützt:
- Zahlenvariablen: Diese können zur Speicherung von Ganzzahl- oder Fließkommazahlen verwendet werden.
- Positionsvariablen: Diese können zur Speicherung von kartesischen Positionen und Gelenkpositionen verwendet werden. Ob eine solche Variable als kartesische Position oder Gelenkposition interpretiert wird, hängt vom Kontext ab.
Roboter-Software downloaden

Die lizenzfreie igus Robot Control Software ist in die Steuerung eingebunden und greift somit auf ein einheitliches Bedienkonzept und durchgängige Kommunikationsdienste für viele Komponenten eines Systems zurück. Das bedeutet weniger Projektierungsaufwand und schnellere Inbetriebnahme.
- Testen Sie alle igus Kinematiken vorab in der Software
- Mit vorprogrammierten Projekten für alle igus Roboter, Einzelachsen und AGV
- Intuitive 3D-Oberfläche mit Simulation des Roboters
Beratung
Gerne beantworte ich Ihre Fragen auch persönlich

Beratung und Lieferung
Persönlich
Montag bis Freitag: 8–20 Uhr
Samstag: 8–12 Uhr
Online
Chat-Service
Montag bis Freitag: 8–16 Uhr (CET/ CEST)
WhatsApp-Service
Montag bis Freitag: 8–16 Uhr (CET/ CEST)